
Einführung
Im dritten Teil zum Thema Deep Learning (DL) befassen wir uns nun mit dem Thema Computer Vision und den dazugehörenden Convolutional Neural Networks (CNNs). Danach schauen wir uns an, welche Möglichkeiten es gibt, um CNNs anzuwenden. Zum Schluss schauen wir uns aufregende Entwicklungen im DL wie zum Beispiel Embeddings und Recurrent Neural Networks (RNNs) an.
Weiterführende Literatur
- Kapitel 10 in ISLR
- Kapitel 10 - 19 in dritter Ausgabe (Third Edition) von HOML
- Kaggle Courses
Convolutional Neural Networks
Convolutional Neural Networks (CNNs) sind eine Art von Deep Learning Modellen, welche hauptsächlich für Computer Vision Probleme verwendet werden. Solche Modelle können also Bilder nach Motiven klassifizieren, Gesichter erkennen, Objekte auf Bildern oder in Videos lokalisieren, etc.
Ganz grob funktionieren CNNs so, dass sie in den ersten paar Layers nach dem Input Layer kleine Muster (sogenannte low-level features) identifizieren, z.B. horizontale oder vertikale Linien, Halbkreise, Kreise, etc. In späteren Layers werden diese kleinen Muster zu grösseren, komplexeren Muster (sogenannte high-level features) kombiniert. Auch hier findet also ein autonomer Feature Engineering Prozess statt. Am Schluss macht das CNN seine Vorhersagen basierend auf den abstrakten Muster und Formen, die es im Bild erkannt hat.
Warum können wir dazu nicht die ANN Modelle, welche wir bereits kennen gelernt haben, verwenden? Weil solche ANNs nur für ganz kleine Bilder (die MNIST Bilder haben eine ganz kleine Auflösung von 28 x 28 Pixels) funktionieren. Für Bilder mit einer höheren Auflösung hätte unser ANN schnell mal viel zu viele Parameter und wäre nicht mehr trainierbar.
Um dieses Problem zu lösen, wurden CNNs entwickelt. Wie CNNs funktionieren und was für Arten von Layers sie enthalten, werden wir uns in diesem Kapitel anschauen.
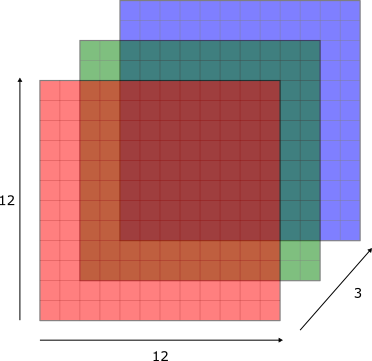
Wir werden hier nun mit farbigen Bilder arbeiten. Im Fall von Grayscale Bildern (wie bei MNIST) konnte jedes Bild durch einen 2D-Array (= Matrix) dargestellt werden. Für farbige Bilder brauchen wir drei Dimensionen, denn jedes Pixel in einem Bild wird definiert durch den Anteil von Rot, Blau und Grün (RBG). Wir können uns ein farbiges Bild als drei Matrizen, welche übereinandergelegt werden, vorstellen:
Die meisten Bilder haben selbstverständlich eine viel höhere Auflösung (in den drei Farbchannels) als 12 x 12. Im folgenden Code Block können Sie beispielsweise die Dimensionen eines Farbbilds eines Zebras anschauen (das Bild ist auf dem Server bereits geladen):
# Dimensionen
dim(zebra)Wir können das Bild selbstverständlich auch direkt in R plotten:
# Quadratischer Plot in R
par(pty = "s")
# Leere Plot-Hülle
plot(0:1, 0:1, type = "n", ann = FALSE, axes = FALSE)
# Bild plotten
rasterImage(zebra, 0, 0, 1, 1)Wichtig: Anders als bei den ANNs müssen wir bei einem CNN das Bild nicht in einen langen Vektor zerlegen. Wir werden das Bild also in der oben schematisch dargestellten 3D Struktur in das CNN einspeisen können. Warum das so ist, werden wir etwas weiter unten sehen.
Convolution Layers
Um genau zu verstehen, was in einem Convolution Layer passiert, werden wir uns hier der Einfachheit halber wieder ein MNIST Beispiel anschauen. Im MNIST haben wir Grayscale Bilder und darum kann das Bild durch eine Matrix (keine Farbchannels notwendig) dargestellt werden. Die meisten CNNs sind aber für Farbbilder (mit drei Farbchannels) konzipiert.
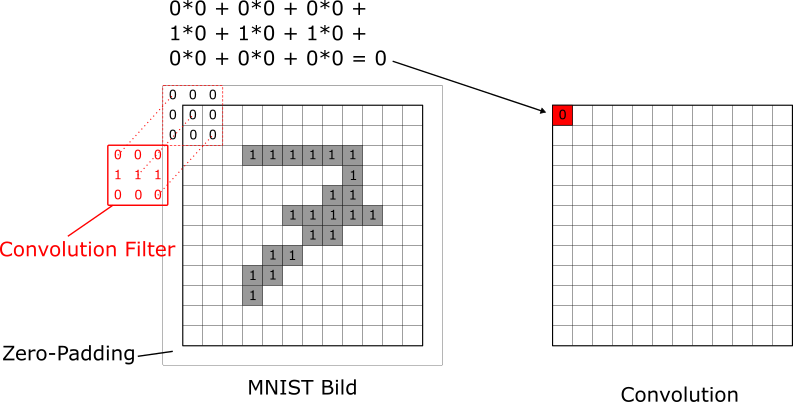
In einem Convolution Layer schieben wir mehrere sogenannte Convolution Filters über ein Bild. Diese Filter haben das Ziel kleine Muster und Formen im Bild zu erkennen. Doch wie sieht so ein Filter aus? Ein Convolution Filter kann durch eine kleine Matrix dargestellt werden. Häufig werden 3 x 3 Filter (also 3 x 3 Matrizen) verwendet. Im Beispiel weiter unten werden wir folgenden Filter verwenden:
\[ \begin{bmatrix} 0 & 0 & 0\\ 1 & 1 & 1\\ 0 & 0 & 0 \end{bmatrix} \] Wir werden sehen, dass sich dieser Convolution Filter eignet, um horizontale Linien im Bild zu erkennen. Überlegen Sie sich kurz anhand der Elemente in der Matrix, warum dieser Filter geeignet sein könnte dafür.
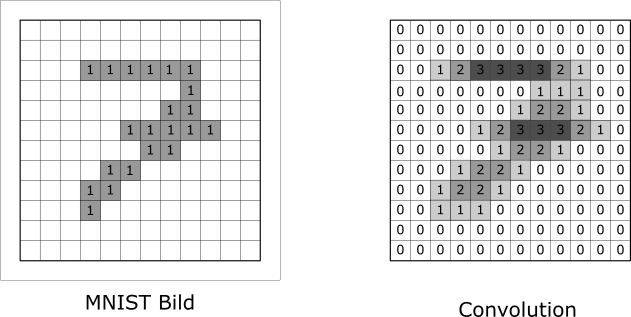
Im folgenden Beispiel schauen wir uns wiederum das Bild der handgeschriebenen “7” an. Der Prozess der Convolution beginnt beim Pixel links oben. Wir legen den Filter über das Bild, so dass die Mitte des Filters genau auf dem Pixel links oben liegt. Dann multiplizieren wir die Werte des Filters mit den darunter liegenden Pixelwerten und summieren die Werte aller Multiplikationen auf. Der resultierende Wert ist dann der Pixelwert links oben im Output, der Convolution. Damit das auch bei allen Pixels am Rand des Bilds funktioniert, umrahmen wir das Bild mit Nullen. Dieser Schritt wird in der Praxis Zero-Padding genannt. Wir sehen in unten stehender Abbildung, dass die Convolution für das Pixel links oben zu einem Wert von 0 führt:
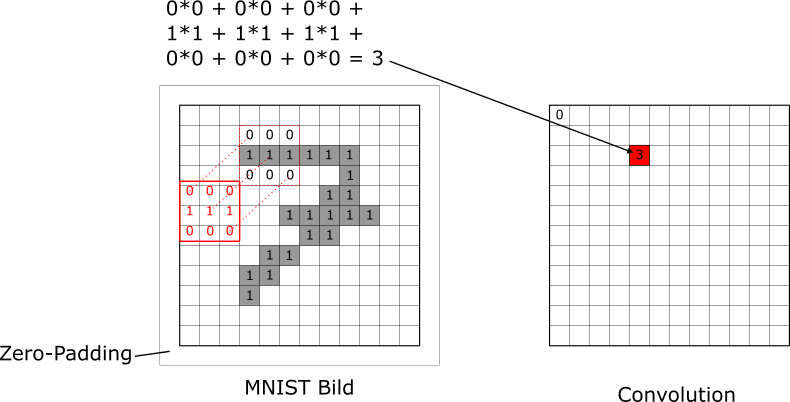
Nun schieben wir den Convolution Filter über das Bild bis wir die Convolution für jedes Pixel berechnet haben. In der nächsten Abbildung schauen wir uns als weiteres Beispiel die Convolution für das Pixel in der dritten Zeile und fünften Spalte an. Hier ist der Output der Convolution nun 3:
Hier eine animierte Version des Convolution Prozesses (Quelle: Vincent Dumoulin und Francesco Visin, via Wikimedia):
Sobald wir den Filter über das ganze Bild geschoben haben und für jedes Pixel die Convolution berechnet haben, kriegen wir den vollständigen Output dieses Filters:
Ihr seht, dass im Output die horizontalen Linien herausragen. Der Filter hat also tatsächlich dieses Muster erkennen können. Allgemein gilt: der Filter gibt dann grosse Werte zurück, wenn das Muster in der 3 x 3 Submatrix des Bilds dem Filter ähnlich ist. Wir haben hier den Filter jeweils um ein Pixel nach rechts (oder unten) verschoben. In diesem Fall spricht man von einem Stride von 1. Mit einem Stride von 2 würden wir den Filter jeweils um 2 Pixel verschieben. Der Output (die Convolution) wäre dann nur halb so gross wie das Bild (also 6 x 6 Pixel).
Und nun der Schlüsselschritt im Verständnis: im obigen Beispiel waren die Werte des Filters (bzw. der Matrix) gegeben. In einem CNN werden die Werte des Filters jedoch automatisch via Backpropagation gelernt. Das CNN lernt also automatisch, auf welche Muster die Filter in den Convolution Layers achten sollen bzw. welche Muster besonders wertvoll sind, um gute Vorhersagen zu machen. Aus meiner Sicht ist das die Magie von CNNs!
Im Fall von Farbbildern ist das ganze etwas komplexer. In dem Fall hat jeder Convolution Filter drei Matrizen (mit potentiell anderen Werten), eine pro Farbchannel. Die Convolution findet dann für jeden Channel separat wie im obigen Beispiel statt und am Schluss werden die drei resultierenden Convolutions wieder übereinandergelegt.
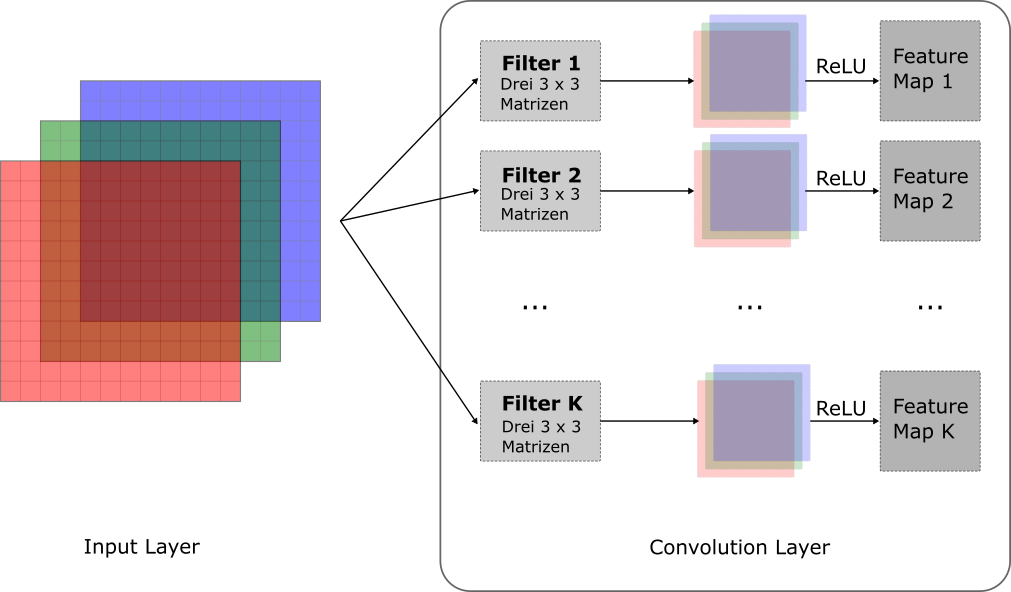
Wie bereits erwähnt, hat ein Convolution Layer typischerweise mehrere Filter. Ganz allgemein sagen wir, dass ein Convolution Layer \(K\) Filter hat, wobei jeder Filter andere Muster erkennen kann. Jeder Filter hat eine Matrix pro Farbchannel und die drei Outputs werden dann wieder übereinandergelegt. Für das resultierende Convolution Bild wird auf jedem Pixel noch die Aktivierungsfunktion ReLU angewendet und am Schluss resultiert pro Filter ein sogenannter Feature Map. Das heisst, ein Convolution Layer mit \(K\) Filter führt zu \(K\) Feature Maps. Dieser Vorgang ist in folgender Abbildung dargestellt:
Überlegen wir uns noch kurz, wie viele Parameter (Gewichte) dieser Convolution Layer hat. Jeder der \(K\) Filter hat drei 3 x 3 Matrizen, d.h. jeder Filter hat insgesamt 27 Parameter plus einen Bias Term pro Filter. Daraus folgt, dass ein Convolution Layer in unserem Beispiel insgesamt \((27 + 1) \cdot K\) Parameter hat. Das sind in der Regel wesentlich weniger Parameter als wenn wir ein reguläres ANN verwenden würden, um das Problem zu lösen.
Um uns den Unterschied zwischen klassischen ANN und CNN noch klarer zu vergegenwärtigen, gehen wir kurz zum vereinfachten MNIST Beispiel zurück. Folgende Abbildung zeigt, was in einem ANN und einem CNN mit dem 12 x 12 Bild einer handgeschriebenen “7” passiert:
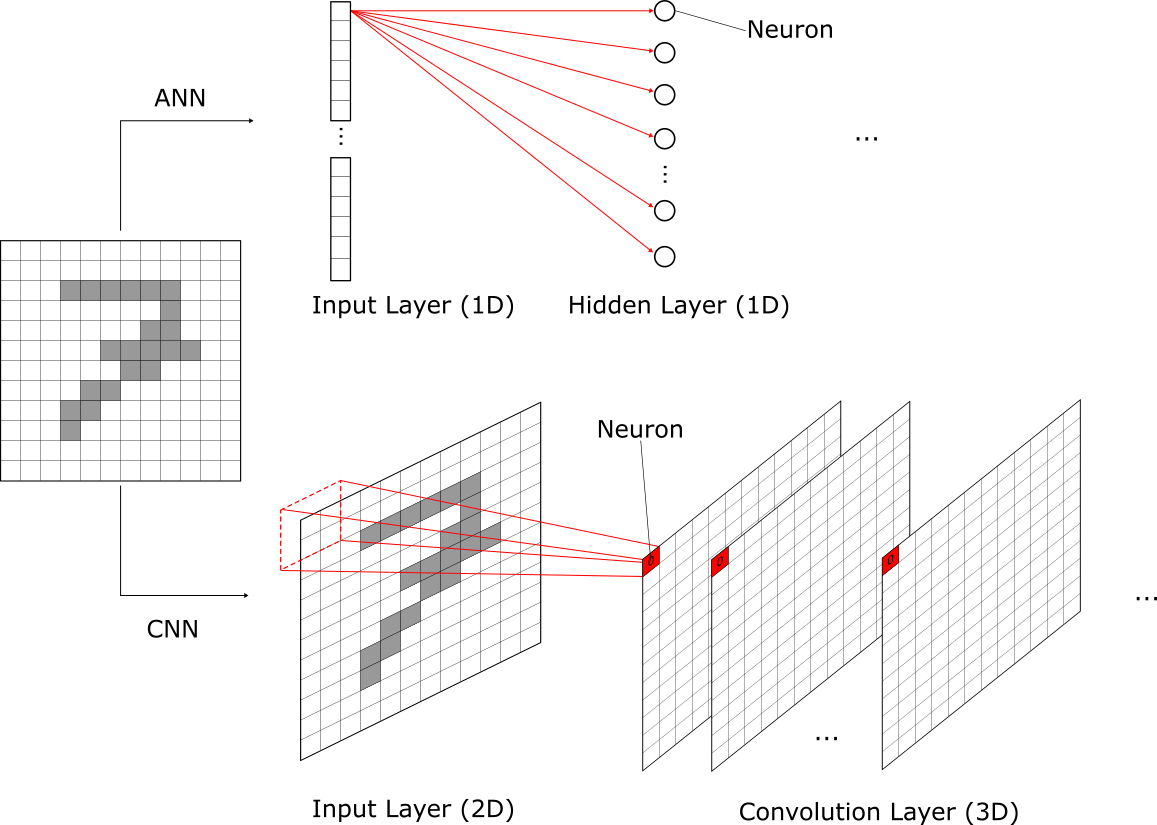
Für das ANN (oberer Teil der Abbildung) werden die Pixel in einen 1D Input Layer geflatted. Der zentrale Punkt ist, dass danach jedes Pixel aus dem Input Layer mit jedem Neuron im Hidden Layer durch ein Gewicht verbunden ist. Für grosse Bilder (z.B. 1000 x 1000 Pixel) wird diese Architektur nicht rechenbar.
Dieses Problem wird durch CNNs gelöst (unterer Teil der Abbildung). Das Bild wird im Originalformat (im Fall eines Grayscale Bilds ist das 2D) im Input Layer dargestellt. Jeder Feature Map im Convolution Layer ist dann ebenfalls zweidimensional. Jedes Pixel in einem Feature Map ist in einem gewissen Sinn ein Neuron. Der zentrale Punkt hier ist, dass jedes Pixel (Neuron) in einem Feature Map nur mit 9 Pixels im Input Layer verbunden ist und darum die Konnektivität im Netzwerk sehr lokal ist. Ausserdem verwendet jedes Pixel (Neuron) in einem Feature Map denselben Filter und darum die selben Parameter. Dies wird oft als Weight Sharing bezeichnet. Die lokale Konnektivität und das Weight Sharing begrenzen die Anzahl Gewichte im Vergleich zu einem klassischen ANN massiv.
Pooling Layers
Nach einem Convolutional Layer kommt in einem CNN oft ein sogenannter Pooling Layer. Ein Pooling Layer erfüllt viele verschiedene Zwecke. Erstens reduziert dieser Layer die Anzahl Berechnungen sowie die Auslastung des Arbeitsspeichers (RAM). Zweitens soll dieser Layer (durch Downsampling) das Overfitting bekämpfen. Und drittens führt dieser Layer zu einer sogenannten Location Invariance, d.h. ob eine horizontale Linie in der zweiten, dritten oder vierten Zeile von Pixel liegt, ist nicht relevant. Der Pooling Layer gibt in allen Fällen ein ähnliches “Signal” an den nächsten Layer weiter.
Doch wie funktioniert der Pooling Layer? Glücklicherweise ist seine Funktionsweise viel einfacher als diejenige des Convolution Layers. In den allermeisten Fällen wird heutzutage ein sogenanntes Max-Pooling angewendet. Dabei wird ganz einfach ein 2 x 2 Quadrat über den Output eines Convolution Filters (also den Feature Map) geschoben. Für jeden nicht-überlappenden 2 x 2 Pixelblock wird der maximale Pixelwert in den Pooling Layer übernommen. Am besten schaut ihr euch dazu das Beispiel in untenstehnder Abbildung an:
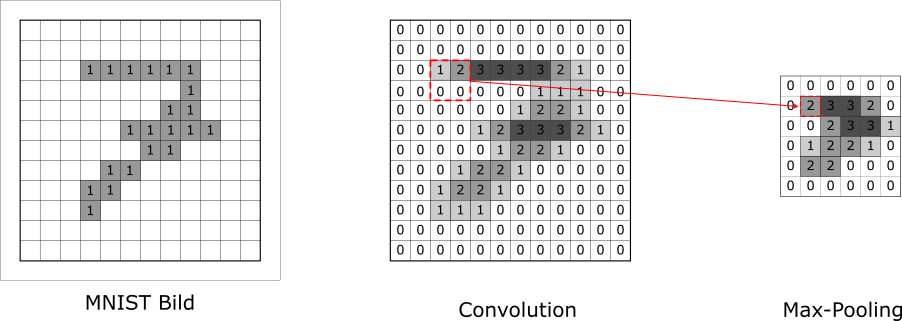
Ganz wichtig: Indem wir Max-Pooling mit einem 2 x 2 Quadrat betrieben, reduzieren wir jeden Feature Map in beide Richtungen um den Faktor 2. Der Pooling Layer reduziert also jeden Feature Map von 12 x 12 zu 6 x 6! Das führt dann eben zu einer Verringerung des Computational Loads!
Die Alternative zu Max-Pooling wäre Mean-Pooling, wo für jeden 2 x 2 Pixelblock der Mittelwert über die vier Pixel gerechnet und in den Pooling Layer übernommen wird.
Architektur
Wie eine vereinfachte Architektur eines CNNs aussieht, zeigt folgende Abbildung (Quelle: HOML, zweite Ausgabe, p. 447):
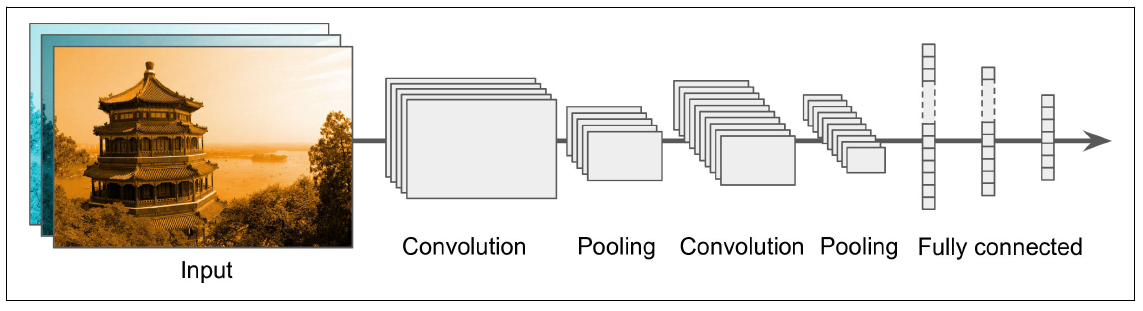
Ihr seht, dass ein CNN typischerweise mehrere Abfolgen von Convolution und Pooling Layers enthält. Nach diesen Convolution-Pooling Sequenzen wird der letzte Pooling Output geflatted und es folgen noch ein paar dense (fully connected) Layers wie wir sie aus einer klassischen ANN Architektur kennen. Und ganz am Schluss kommt der Output Layer, welcher in Bildklassifikationsproblemen meist ein Softmax Layer ist, da wir versuchen ein Bild in eine von (z.B.) 1000 Kategorien zu klassifizieren (z.B. Vogel, Haus, Baum, Person, etc.).
Wir können beobachten, dass die Feature Maps durch das Pooling stets etwas kleiner werden. Dafür erhöhen wir grundsätzlich die Anzahl Feature Maps von Layer zu Layer, indem wir in jedem Convolution Layer die Anzahl Filter \(K\) erhöhen.
Die Architektur eines CNNs sowie die Ausgestaltung der einzelnen Layers ist enorm flexibel und es gibt unzählige Hyperparameter (Anzahl Convolution Layers, Anzahl Pooling Layers, Stride, Dimensionen der Convolution Filter, Zero-Padding oder nicht, Max- oder Mean-Pooling und viele weitere).
Data Augmentation
Eine Technik, welche CNNs massiv verbessert hat, ist Data Augmentation. Bei dieser Technik werden die Bilder während des Trainings leicht verändert. Zum Beispiel kann ein gegebenes Bild leicht verschoben oder rotiert, einen Ausschnitt daraus gewählt oder die Lichtbedingungen verändert werden. Ein Beispiel seht ihr in folgender Abbildung (Quelle: TseKiChung via Wikimedia):

Data Augmentation wirkt wie Regularisierung und kann das Overfitting von CNNs wesentlich eindämmen. Ein weiterer toller Aspekt von Data Augmentation ist, dass die Veränderungen der Bilder on the fly während des Modelltrainings gemacht werden können und die veränderten Bilder nicht abgespeichert werden müssen. Mit Keras und TensorFlow können wir Layers direkt nach dem Input Layer ins Modell aufnehmen, die solche Data Augmentation Schritte für uns durchführen. Details dazu findet ihr hier.
Anwenden von Modellen
Es gibt viele verschiedene Möglichkeiten, wie ihr Deep Learning Modelle anwenden könnt. Die verschiedenen Möglichkeiten unterscheiden sich im Grad der technischen Komplexität und hängen davon ab, ob eine bestehende Lösung euer konkretes Problem bereits vollumfänglich abbildet. Konkret gibt es folgende Möglichkeiten:
- Ihr verwendet ein Deep Learning Modell über einen API-Service, der oft von grossen Firmen wie Amazon, Google oder OpenAI angeboten wird. Das ist sehr einfach, hat jedoch den Nachteil, dass ihr keinerlei Flexibilität habt und das Modell nicht verändern könnt. Ausserdem sind solche Dienstleistungen in den meisten Fällen kostenpflichtig.
- Wie weiter unten demonstriert, könnt ihr bestehende (trainierte) Modelle (vor allem CNNs) auch direkt mit Keras herunterladen und verwenden. Dabei habt ihr vollen Einblick in das Modell und allzu schwierig ist es dank Keras auch nicht. Für mobile Applikationen enthält Keras sogar sogenannte Lightweight Modelle (MobileNet).
- Wenn es für euer Problem, das ihr lösen wollt, keine vorgefertigte Lösung gibt (zum Beispiel wenn ihr andere Kategorien als die ImageNet Kategorien vorhersagen wollt), dann könnt ihr ein bestehendes (CNN) Modell nehmen und nur die letzten paar Layers trainieren. Dieser Prozess wird Transfer Learning genannt und ist enorm hilfreich. Die Convolution Layers von grossen Modellen, die von Google etc. trainiert wurden, eignen sich oft auch für andere Probleme. Eine Anleitung für das Transfer Learning findet ihr hier.
- Last but not least könnt ihr natürlich auch ein eigenes Modell von Grund auf trainieren. Doch dazu braucht ihr erst einmal einen sehr grossen und vor allem gelabelten Datensatz. Für das Labelling greifen die Entwicklerinnen und Entwickler von DL Modellen oft auf Crowdsourcing Plattformen wie z.B. AmazonTurk zurück. Wie das Trainieren eines eigenen CNNs funktioniert, ist in diesem Tutorial oder in HOML (für Python) beschrieben. Für realistische Modelle empfehle ich euch, eine Cloud Lösung zu verwenden (Google Colab), denn unsere Notebooks haben grundsätzlich zu wenig Processing Power und vor allem auch zu wenig Arbeitsspeicher (RAM), ausser ihr habt eine Graphics Processing Unit (GPU). Wie ihr lokal mit R eine GPU einbindet, ist hier beschrieben.
Anwenden eines bestehenden CNNs
Wir schauen uns hier ein bestehendes CNN an, das mit den Daten aus der ImageNet Challenge trainiert wurde. Der entsprechende Datensatz enthält über 14 Millionen Bilder, welche alle gelabelt sind. Jedes Bild muss in eine von 1000 Kategorien klassifiziert werden. Die möglichen Kategorien findet ihr hier. Die Performance wird mit der Top-5 Error Rate gemessen, d.h. eine Vorhersage entspricht nur dann einem Fehler, wenn das wahre Label nicht unter den Top-5 Vorhersagen ist. Das aktuell beste Modell hat eine Top-5 Error Rate von etwas mehr als 2%. Wow!
Wir werden hier das ResNet50 Modell verwenden. Dieses Modell hat die 2015 ImageNet Challenge gewonnen. Die Architektur dieses Modells ist ziemlich komplex - wir werden das weiter unten sehen. Als erstes laden wir nun aber das trainierte Modell mit Keras. Dazu verwenden wir die Funktion application_resnet50(). Wir kriegen das Modell mit den optimalen Gewichten, indem wir das Argument weights = "imagenet" setzen. Mit der summary() Funktion können wir uns die Architektur des Modells anschauen:
# Packages laden
library(tidyverse)
library(tensorflow)
library(keras)
library(jpeg)
# Als erstes laden wir das resnet50 Model und zwar mit den optimalen Gewichten.
model <- application_resnet50(weights = "imagenet")
# Schauen wir uns die Architektur dieses Modells mal an.
summary(model)Model: "resnet50"
__________________________________________________________________________________________________
Layer (type) Output Shape Param # Connected to
==================================================================================================
input_1 (InputLayer) [(None, 224, 224, 3)] 0
__________________________________________________________________________________________________
conv1_pad (ZeroPadding2D) (None, 230, 230, 3) 0 input_1[0][0]
__________________________________________________________________________________________________
conv1_conv (Conv2D) (None, 112, 112, 64) 9472 conv1_pad[0][0]
__________________________________________________________________________________________________
conv1_bn (BatchNormalization) (None, 112, 112, 64) 256 conv1_conv[0][0]
__________________________________________________________________________________________________
conv1_relu (Activation) (None, 112, 112, 64) 0 conv1_bn[0][0]
__________________________________________________________________________________________________
pool1_pad (ZeroPadding2D) (None, 114, 114, 64) 0 conv1_relu[0][0]
__________________________________________________________________________________________________
pool1_pool (MaxPooling2D) (None, 56, 56, 64) 0 pool1_pad[0][0]
__________________________________________________________________________________________________
...
_______________________________________________________________________________________________________
avg_pool (GlobalAveragePooling2D) (None, 2048) 0 conv5_block3_out[0][0]
_______________________________________________________________________________________________________
probs (Dense) (None, 1000) 2049000 avg_pool[0][0]
=======================================================================================================
Total params: 25,636,712
Trainable params: 25,583,592
Non-trainable params: 53,120
_______________________________________________________________________________________________________Die Architektur des Modells ist riesig, weshalb ich sie hier verkürzt dargestellt habe. Ihr seht beim Input Layer, dass das Modell Farbbilder (3 Channels) mit einer Auflösung von 224 x 224 Pixel erwartet. Nach dem Input Layer kommt der erste Convolutional Layer. In Keras bzw. TensorFlow werden die einzelnen Elemente eines Convolution Layers separat dargestellt. In einem ersten Schritt wird das Zero Padding gemacht und da brauchen wir selbstverständlich keine Gewichte dazu. Dann kommen 64 (7 x 7) Convolution Filters. Überlegen wir uns doch kurz, wie wir auf die insgesamt 9472 Gewichte kommen. Wir haben 64 Filter, wovon jeder drei 7 x 7 Matrizen enthält. Warum drei? Weil wir pro Farbchannel eine separate 7 x 7 Matrix haben. Das gibt uns bereits \(64 \cdot 3 \cdot 7 \cdot 7 = 9408\) Gewichte. Dazu kommen noch 64 Bias Terms, was uns dann insgesamt \(9408 + 64 = 9472\) Gewichte gibt.
Danach kommt eine sogenannte Batch Normalization, was vereinfacht nichts anderes als eine Standardisierung der Outputs der Convolution Filters ist. Danach die ReLU Aktivierung, ein weiteres Zero Padding und zum Abschluss ein Max-Pooling Layer. Nach dem Max-Pooling haben wir dann nur noch 64 (56 x 56) Feature Maps, was eine Halbierung der Auflösung bedeutet. Danach kommen viele weitere solche Sequenzen von Convolutional und Pooling Layers.
Der Output Layer ist dense und enthält 1000 Neurons, da wir die Wahrscheinlichkeiten für 1000 Kategorien rechnen wollen. Der zweitletzte Layer hat 2048 Neurons, wodurch der Output Layer insgesamt \((2048 + 1) \cdot 1000 = 2'049'000\) Gewichte hat. Ganz unten im Output ist ersichtlich, dass das Modell insgesamt über 25 Millionen Parameter hat, wovon die meisten trainiert werden müssten. Hier haben wir aber die bereits trainierten (optimalen) Gewichte importieren können.
Nun extrahieren wir die Gewichte aus dem Modell und schauen uns den ersten Filter im ersten Convolutional Layer an. Anhand des Indexings, [ , , , 1], seht ihr, dass die Gewichte in einem 4-dimensionalen Array gespeichert sind. Die ersten beiden Dimensionen bezeichnen die Dimensionen der Filtermatrizen (also 7 x 7). Die dritte Dimension bezeichnet die Anzahl Feature Maps, welche der Convolutional Layer aus dem vorherigen Layer erwartet. In unserem Fall sind das 3, da wir im ersten Convolutional Layer die drei Farbchannels aus dem Input Layer erhalten. Die vierte Dimension bezeichnet die Anzahl Filter des vorliegenden Convolutional Layers. Mit der 1 spezifizieren wir, dass wir nur den ersten Filter anschauen wollen.
# Wir können auch die Gewichte extrahieren.
optimal_weights <- model %>% get_weights()
# Erster Convolution Filter im ersten Conv. Layer
optimal_weights[[1]][ , , , 1], , 1
[,1] [,2] [,3] [,4] [,5] [,6] [,7]
[1,] 0.028252628 0.01818723 0.015884932 0.002420052 -0.05301533 -0.04735583 0.01854295
[2,] 0.007990093 0.02488567 0.076726004 0.090264283 -0.01891512 -0.07935619 -0.01536172
[3,] -0.027473288 -0.06575351 0.019992139 0.184763417 0.11552856 -0.08998038 -0.09464549
[4,] -0.009787651 -0.07923734 -0.129819512 0.095235661 0.27007112 0.09940726 -0.01493159
[5,] 0.023180470 -0.04645163 -0.183006614 -0.156041548 0.05361670 0.08349565 0.03695760
[6,] 0.042254806 0.04594706 -0.046616178 -0.127040774 -0.02102392 0.03322218 0.02505229
[7,] 0.014630316 0.03523030 0.004108737 -0.060385078 -0.01716923 0.01151425 0.00479147
, , 2
[,1] [,2] [,3] [,4] [,5] [,6] [,7]
[1,] 0.005868278 0.01875543 0.03614214 0.01715494 -0.09355789 -0.124100089 -0.02680790
[2,] -0.007687946 0.02429662 0.14944476 0.21562344 0.01338885 -0.176872283 -0.12294715
[3,] -0.074660495 -0.15249401 0.06102424 0.41499856 0.33233449 -0.081507459 -0.21111147
[4,] -0.054444715 -0.25528842 -0.26442963 0.21033862 0.57014650 0.277241141 -0.02648117
[5,] 0.023048820 -0.17785294 -0.41178319 -0.26845443 0.18579270 0.250555605 0.09637067
[6,] 0.097701266 0.03894836 -0.19233614 -0.29224005 -0.03729927 0.099565394 0.10021943
[7,] 0.061221115 0.06344386 -0.02231540 -0.17049119 -0.08630268 0.007418274 0.02751930
, , 3
[,1] [,2] [,3] [,4] [,5] [,6] [,7]
[1,] -0.0024409075 0.01904538 0.02179598 -0.003380956 -0.0769589692 -0.07131131 0.01439408
[2,] 0.0003704716 0.02912742 0.11718027 0.150795683 -0.0093867844 -0.13021459 -0.07923260
[3,] -0.0334048420 -0.08807442 0.08053155 0.324004412 0.2164803147 -0.09732457 -0.17507587
[4,] -0.0174925867 -0.15134996 -0.18083088 0.167103648 0.4065239429 0.16355224 -0.07702903
[5,] 0.0203978457 -0.10906302 -0.27673617 -0.172197968 0.1320384443 0.14969076 0.02951569
[6,] 0.0638262108 0.04572181 -0.11566665 -0.178826123 0.0007846743 0.06553538 0.06971015
[7,] 0.0186353922 0.03358492 -0.02011830 -0.127520546 -0.0607556999 0.00784576 0.02711843Wie erwartet besteht der erste Filter aus drei 7 x 7 Matrizen.
Wir laden nun das Bild des Zebras mit der Funktion image_load() und lassen es durch die Funktion gleich in die korrekte Auflösung überführen. Wir erinnern uns, dass ResNet50 Bilder mit einer Auflösung von 224 x 224 Pixels erwartet. Danach konvertieren wir das Bild in einen 3D-Array:
# Lade ein Bild mit 'image_load()'
# Wichtig: resnet50 erwartet eine Auflösung von 224 x 224 Pixels
img <- image_load("zebra.jpg", target_size = c(224, 224))
# Wir konvertieren das Bild in einen 3D-Array (letzte Dimension sind die drei Farbchannels)
x <- image_to_array(img)Wir können das Bild mit geringerer Auflösung nochmals plotten:
# Quadratischer Plot in R
par(pty = "s")
# Leere Plot-Hülle
plot(0:1, 0:1, type = "n", ann = FALSE, axes = FALSE)
# Bild plotten
rasterImage(x / 255, 0, 0, 1, 1)
Nun verändern wir die Dimensionalität des Bilds in einen 4-D Array. Warum wir das tun, ist im Code Kommentar unten beschrieben.
# Hier müssen wir noch eine vierte Dimension voranstellen.
# Diese Dimension bezeichnet die Batchgrösse. Da wir hier
# nur für ein Bild eine Vorhersage machen wollen, hat diese
# Dimension den Wert 1.
x <- array_reshape(x, c(1, dim(x)))Die Funktion imagenet_preprocess_input() enthält alle notwendigen Preprocessing Schritte, welche das Modell erwartet.
# Und nun noch ein paar spezifischen Preprocessing Schritte,
# welche in der Funktion 'imagenet_preprocess_input()' def. sind.
x <- imagenet_preprocess_input(x)Nun können wir die Vorhersage des Modells für unser Bild x rechnen und die Top-5 Vorhersagen ausgeben lassen.
# Nun rechnen wir die Vorhersage
preds <- model %>% predict(x)
# Schöner Output
imagenet_decode_predictions(preds, top = 5)[[1]] class_name class_description score
1 n02391049 zebra 9.998761e-01
2 n02129604 tiger 2.369525e-05
3 n02422699 impala 1.781611e-05
4 n02422106 hartebeest 1.060396e-05
5 n02123159 tiger_cat 8.302844e-06Das Modell hat kein Problem, das Bild korrekt zu klassifizieren! Doch was passiert eigentlich in all diesen Convolution Layers? Der folgende Blogpost zeigt die Outputs der Convolutions Layers für eine andere bekannte CNN Architektur, nämlich VGG16.
Im Bereich Computer Vision gibt es viele verschiedene Probleme. Das Hauptproblem ist die Klassifikation eines Objekts in einem Bild - das Problem, das wir bis jetzt betrachtet haben. Andere Probleme sind die gleichzeitige Klassifikation und Lokalisation eines Objekts in einem Bild, die Erkennung von mehreren Objekten in einem Bild oder die Klassifikation jedes Pixels in einem Bild. All diese Varianten des Standard Computer Vision Problems sind am Ende des Kapitels 14 in HOML im Detail beschrieben.
Embeddings
Coming soon…
Recurrent Neural Networks
Coming soon…